Locomotion of Fishes:


Ladyfish, Elops saurus, surfing through the waves in the Gulf of Mexico, Padre Island, TX. © Sara Krebsbach 2020.
The main locomotion type in fishes is swimming. Fish body and fin shapes, and their resulting swimming types, are largely a result of the density and viscosity of water. Water is 800 times denser and 50 times more viscous than air! Fish are able to swim through water when forward thrust (movement) is greater than the drag exerted on their body (Lindsey, 1978; Webb, 1984). Dense, viscous water results in two types of drag:
1. Viscous/Frictional drag:
Viscous/Frictional drag occurs between the skin of the fish and the boundary layer of water itself. It is affected by the shape of the fish’s body and fins, the smoothness or roughness of the fish’s skin, as well as the total surface area of the fish. Smooth skin or overlapping scales results in lesser friction; Rough skin results in higher friction. Another way fish reduce the viscous/frictional drag created by swimming in water is mucous production! Viscous forces reduce momentum when fish are swimming.
2. Inertial/Pressure drag:
Inertial/Pressure drag is a result of pressure differences created by the displacement of water as fish are swimming. Pressure increases as swimming speed increases, and is highly linked to body shape. Fast pelagic fish, like tunas and sharks, have evolved streamlined fusiform bodies to reduce drag and maintain top speeds at a high efficiency. Inertial forces help to maintain momentum when fish are swimming.

American Eel, Anguilla rostrata. © Sara Krebsbach 2024.
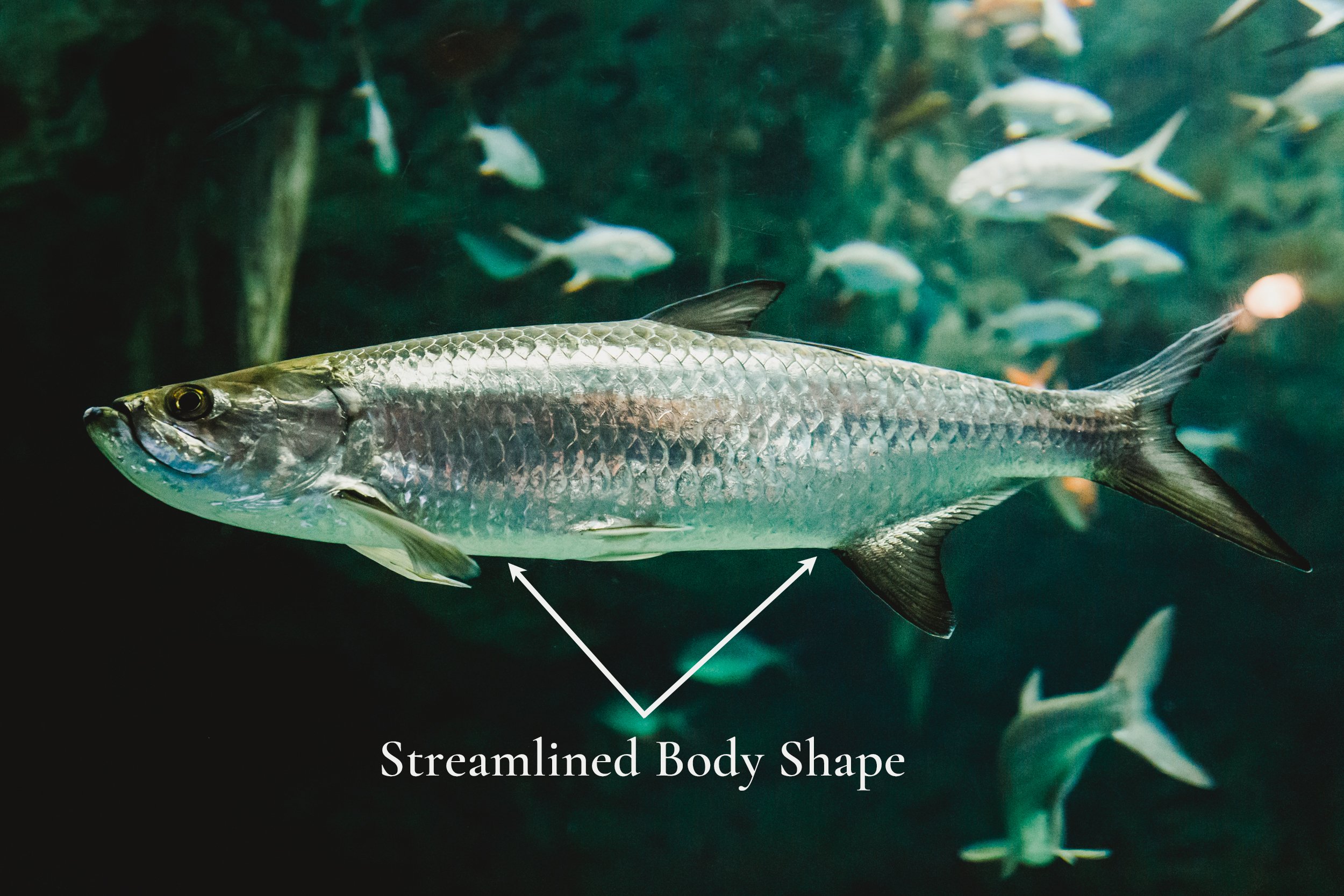
Atlantic Tarpon, Megalops atlanticus. Photographed at Texas State Aquarium, TX, in March, 2024. © Sara Krebsbach 2024.
Fish create forward movement in water by contracting muscles on one side of the body while the muscles on the other side are relaxed. These contractions cause “opposite reactive forces”, and result in forward thrust. Fish move their bodies and fins in two ways:
1. Undulations:
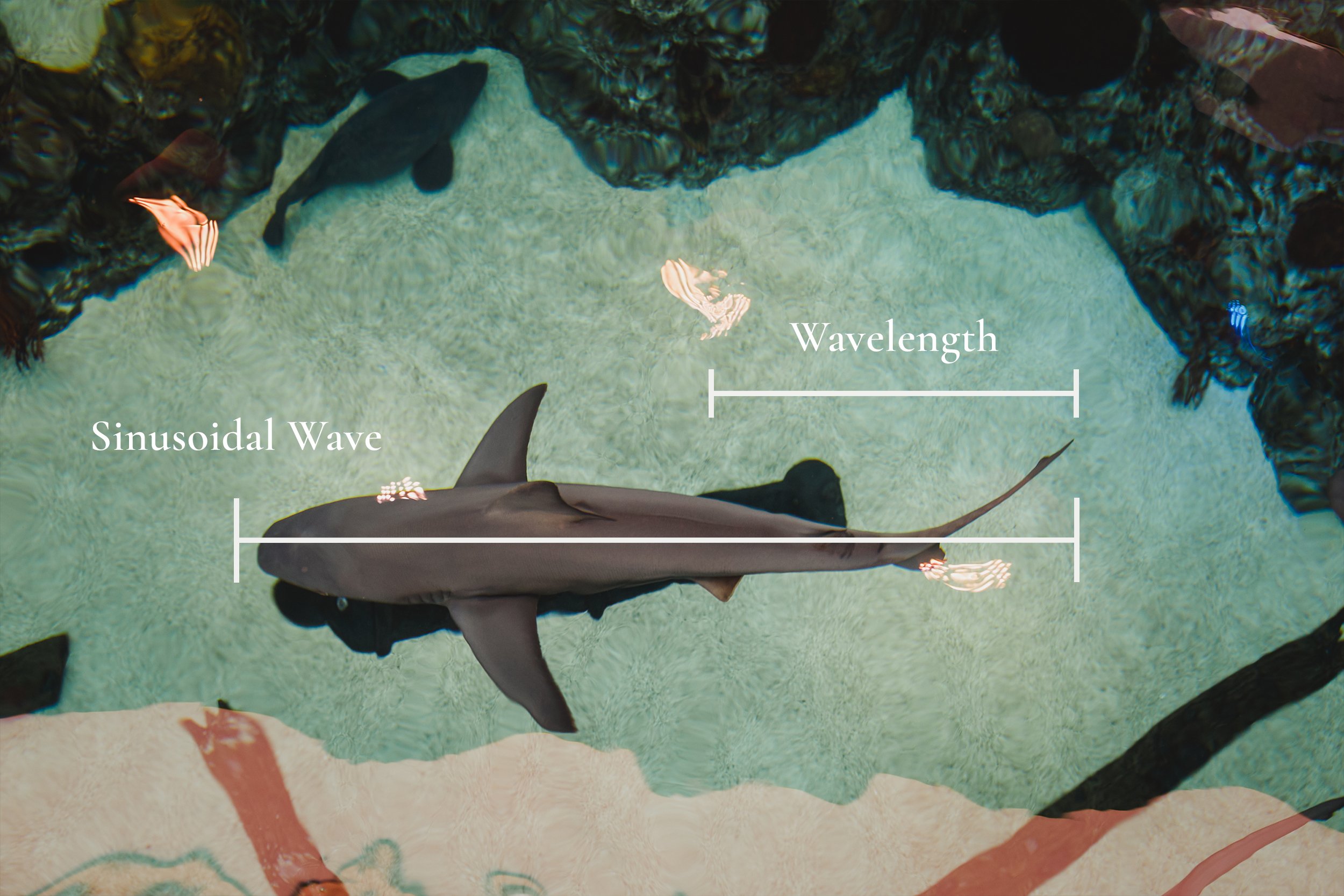
Undulations are sinusoidal (curved) waves passing directionally along both the body and fins, the median fins (dorsal, anal, and caudal), or the paired fins (pectoral and pelvic). In some species, these undulations can move anteriorly and posteriorly, allowing a fish to swim both forward and backward.
2. Oscillations:
Oscillations are created when a fish essentially hinges a body part back and forth, either the caudal fin, median fins, or the paired fins.
Locomotion type in fishes are split in two categories, body and/or caudal fin locomotion (BCF) and median and/or paired fin locomotion (MPF). The majority of fishes use BCF locomotion, which is characterized by undulations of the body and caudal fin, with the percentage of body length utilized, and the axial head movement side to side, indicating the sub-category or mode being used. Advanced bony fishes tend to use MPF locomotion, which is characterized by undulations or oscillations of the pectoral, dorsal, anal, or anal and dorsal fin simultaneously, with the fin type utilized indicating the mode being used. BCF locomotion is more efficient at higher speeds because it allows for greater thrust, resulting in higher momentum and therefore speed. MPF locomotion is more efficient at slower speeds and allows for greater maneuverability. Keep in mind that the swimming modes outlines below are a continuum and some species utilize more than one locomotion type to maintain efficiency. The species listed below as examples match Breder’s 1926 and Lindsey’s 1978 canonical works, ‘The locomotion of fishes’ and ‘Form, Function and Locomotory Habits in Fish’. However, recent studies question the legitimacy of separating fish into distinct swimming modes based on their morphology, and suggest intraspecific variation occurs regularly (Sfakiotakis et al., 1999; Di Santo et al. 2021).
1. Body and/or Caudal Fin Locomotion (BCF):
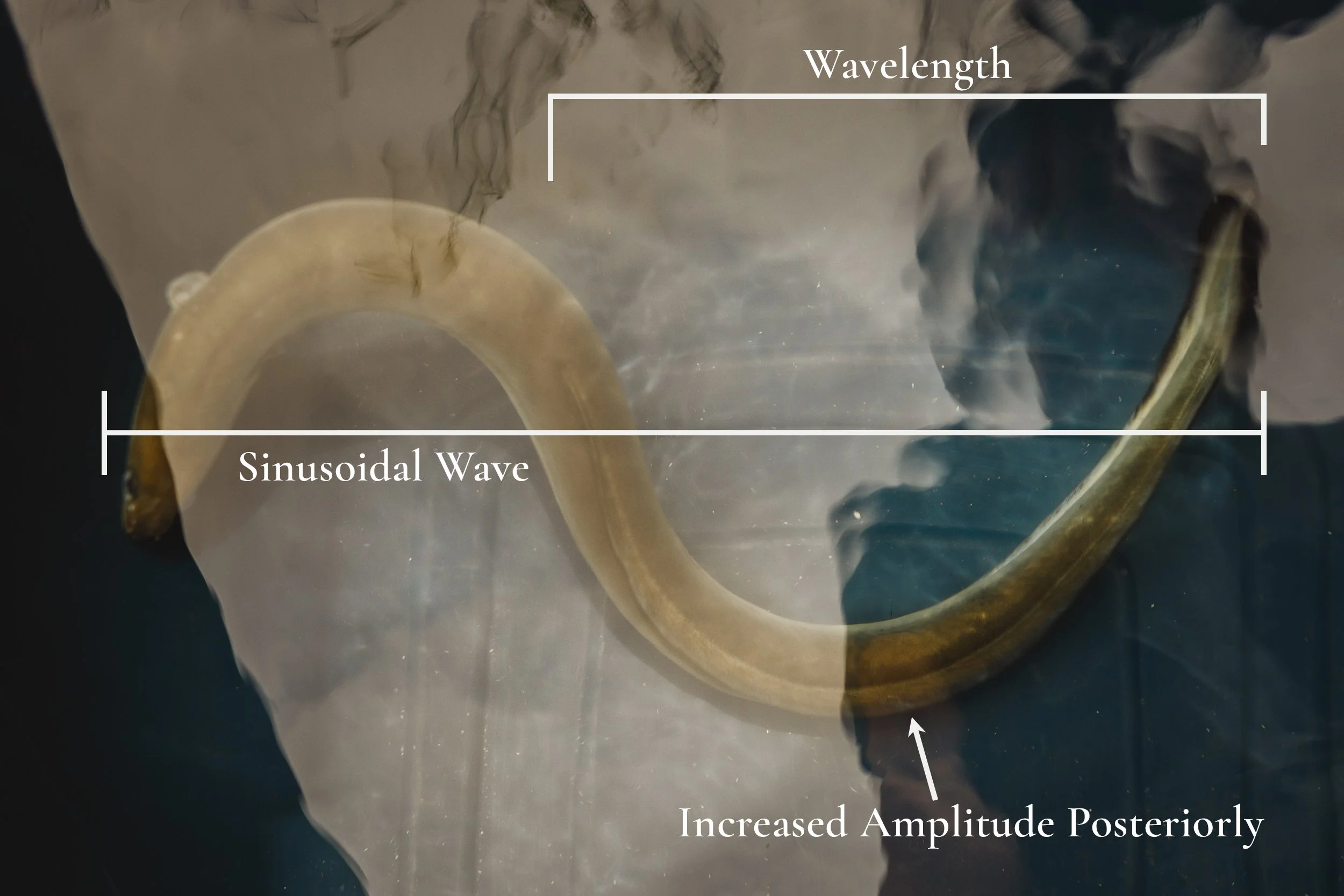
Anguilliform swimming is characterized by undulations of the body and caudal fin. Fish species using anguilliform locomotion typically have very flexible and elongate bodies that can be bent into at least half of a sine wave, when viewed dorsally. The angle of the wave is constantly changing, and thus drag changes concurrently. As the wave travels down the body of a fish, anterior to posterior, the wave increases in amplitude, however; the speed of the wave remains constant. This results in faster than gross movement of the fish, due to drag, which is caused by the lateral movement of the fish’s body as it is pushing on the water during thrust. In anguilliform swimming mode, the entire body of the fish contributes to the propulsive force, except for the head. Anguilliform locomotion is generally considered a slower form of swimming, but allows a fish to navigate densely vegetated environmets with high particulate content, and they are able to swim backward out of tight spaces. However, anguillid eels also utilize anguilliform swimming mode in their long pelagic migration as well. Anguilliform locomotion is also seen in larval fishes, although the adult may utilize another mode of swimming (Lindsey, 1978). This locomotion type can be used because larvae have unossified skeletons and can easily maneuver their bodies into sinusoidal waves before metamorphosing into their adult form. (Helfman et al., 2023). Watch Anguilliform swimming here.

American Eel, Anguilla rostrata. Photographed at the authors home, supplied by Captain Brett Stone of No Fly Zone Fishing, in East Dennis, MA. The elver eel was harvested by a licensed eel harvester in coastal Maine, and raised at the aqua-farm, AmericanUnagi, in Waldoboro, ME.© Sara Krebsbach 2024.
Anguilliform Swimming. © Sara Krebsbach 2024.
Subcarangiform swimming is characterized by undulations of the posterior half of the body, and the caudal fin. Instead of using the entire body to generate a wave, Subcarangiform swimmers have internal ligaments that shift force from the anterior region of the body to the caudal region, to generate thrust (Helfman et al., 2023). As a wave travels down the body of the fish, the amplitude remains constant (Lindsey, 1978). To increase swimming speed, the frequency of body movement and tail beats must increase. In Subcarangiform species, we start to see the narrowing of the caudal peduncle, however the tail remains broad and flexible, resulting in a low aspect ratio caudal fin. Fish species using this mode of swimming can hover in the water column, and rapidly accelerate from a dead stop to dart at prey or evade predation. Watch Subcarangiform swimming here.
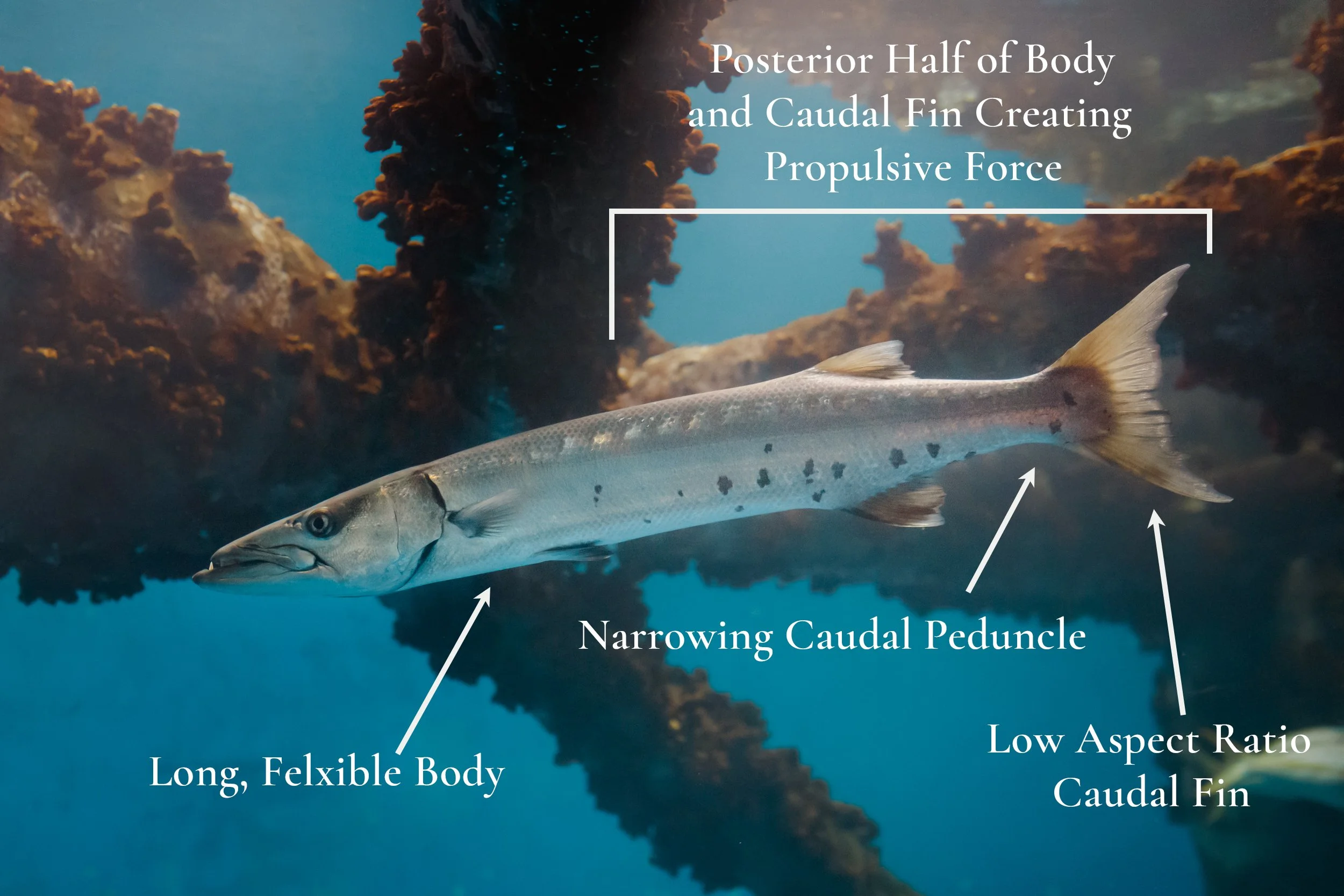
Great Barracuda, Sphyraena barracuda. Photographed at Texas State Aquarium, TX, in March, 2024. © Sara Krebsbach 2024.

Subcarangiform Swimming. © Sara Krebsbach 2024.
Carangiform swimming is charcterized by undulations of the posterior third of the body, and the caudal fin. We see increased thrust capabilities in Carangiform swimmers due to increased rigidity throughout the length of their bodies, as well as narrowing of the caudal peduncle and a stiff caudal fin. The narrow caudal puduncle, as well as the fusiform shape of Carangiform swimmers, help inhibit any recoil that might occur due to only the back third of the body being used to generate thrust (Lindsey, 1978, Sfakiotakis et al., 1999). In Carangiform swimmers, their narrow caudal peduncle connects to a high aspect ratio caudal fin, that is often deeply forked, which reduces drag while creating thrust. Due to the rigidity of both the body and caudal fin or Carangiform swimmers, we see less maneuverability and a loss of rapid acceleration capability seen in the Subcarangiform swimmers, however; these fish excel at maintaining high efficiencies during sustained swimming. Watch Carangiform swimming here (2:30).

Alantic Tarpon, Megalops atlanticus. Photographed at Texas State Aquarium, TX, in March, 2024. © Sara Krebsbach 2024.

Carangiform Swimming. © Sara Krebsbach 2024.
Thunniform swimming is characterized by rapid undulations of a narrow caudal peduncle and lunate/cresent shaped caudal fin. The fusiform body shape, dorsoventrally compressed caudal peduncle, high aspect ratio caudal fin, and lateral keels in some species, all reduce frictional drag. In Thunniform species, the narrow caudal peduncle leads to a high aspect ratio caudal fin that is shaped like a crescent moon with pointed tips. This unique shape reduces viscous/frictional drag due to a reduction in surface area of the caudal fin, and the tips reduce inertial/pressure drag by minimizing vortices that occur during the thrusting back and forth through water. In addition to a rigid body, there are tendons in Thunniform species that connect their body muscles through the caudal peduncle, to shift forces to the caudal fin rays, creating a pulley to generate maximum thrust (Lindsey, 1978, Helfman et al., 2023). Thunniform swimmers are fast swimming predators that inhabit open pelagic waters, with a high volume of red muscle that lays close to the vertebral column. This provides the rigidity mentioned above, as well as the ability to retain some of the heat produced by swimming. Watch Thunniform swimming here.

Palometa, Trachinotus goodei. Photographed at Texas State Aquarium, TX, in March, 2024. © Sara Krebsbach 2024.

Thunniform Swimming. © Sara Krebsbach 2024.
Ostraciiform swimming is characterized by oscillations of the caudal fin only to generate thrust. The body of an Ostraciiform swimmer is extremely rigid, and is encased in a hard dermal shell up to the caudal peduncle. Ostraciiform species are typically shaped like a cylindrical box and attain very slow speeds, however their unique shape allows water to flow over them and to retain their position without having to utilize the median, paired fins or swim bladder. Watch Ostraciiform swimming here.

Longhorn Cowfish, Lactoria cornuta. Photographed at Texas State Aquarium, TX, in March, 2024. Lovingly named ‘Cheese’. © Sara Krebsbach 2024.

Ostraciiform Swimming. © Sara Krebsbach 2024.
2. Median and/or Paired Fin Locomotion (MPF):
Rajiform + Mobuliform swimming is characterized by undulations or oscillations of the broad pectoral fins distinctive of skates and rays (Breder, 1926). The pectoral fins are used for fast cruising and steering, as well as slow movements, such as hovering, manipulating the benthos, and maneuvering. Skates and rays can create propulsive thrust using oscillations of the broad pectoral fins, or by using undulations that pass anteriorly or posteriorly throughout the fin along the distal edges. Rajiform + Mobuliform swimmers typically have a reduced dorsal fin near the tip of the tail, which wisps behind the fish contributing very little to propulsion; the pelvic fins are used for stability and maneuvering. Watch Mobuliform swimming here (0:45).

Cownose Ray, Rhinoptera bonasus. Photographed after washing up on Padre Island National Seashore, TX, in February, 2021.© Sara Krebsbach 2024.

Rajiform Swimming. © Sara Krebsbach 2024.
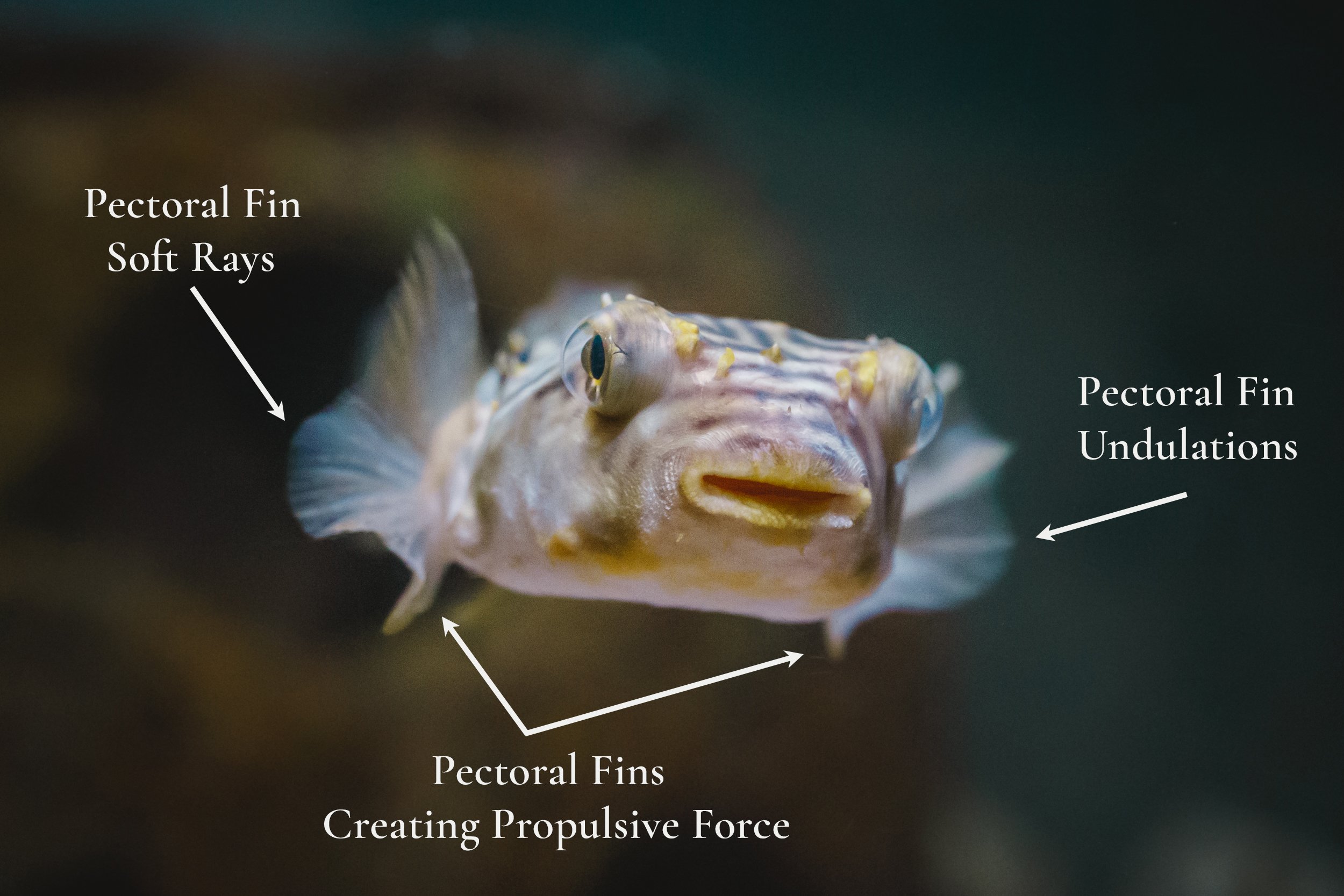
Diodontiform swimming is characterized by undulations of the pectoral fins, found in the family Diodontidae (porcupine fish). The base of the pectoral fins in Diodontiform swimmers are almost completely vertical (Lindsey, 1978), as opposed to the horizontal base of Rajiform swimmers. Members of the Diodontidae family will undulate the individual rays of the fin for propulsion, but can also flap the entire fin, switching to Labriform swimming. The combination of both undulation types, as well as the use of the dorsal, anal, and caudal fin for stability and steering, result in highly accurate maneuvering capability. Watch Diodontiform swimming here.

Striped Burrfish, Chilomycterus schoepfi. Photographed at Texas State Aquarium, TX, in March, 2024. © Sara Krebsbach 2024.
Diodontiform Swimming. © Sara Krebsbach 2024.
Labriform swimming is characterized by synchronous oscillations of the pectoral fins, and is common among reef fishes. Unlike the Diodontiform swimmers above, the base of the pectoral fins in Labriform swimmers are horizontal and narrow. Labriform swimmers can either row their pectoral fins backward (like an oar) and then feather their pectoral fins forward, or flap their pectoral fins (Sfakiotakis, 1999). Typically, a Labriform swimmer will use a combination of both methods that complements their behavior. The anal, dorsal, and caudal fins are used for stability and maneuvering. Watch Labriform swimming here.

Blue Tang, Acanthurus coeruleus. Photographed at Texas State Aquarium, TX, in March, 2024. © Sara Krebsbach 2024.

Rainbow Parrotfish, Scarus guacamaia. Photographed at Texas State Aquarium, TX, in March, 2024. © Sara Krebsbach 2024.
Amiiform swimming is characterized by propulsive undulations of the long dorsal fin found in the family, Amiidae (two extant species of Bowfin). Amiiform swimmers are slow moving, can move forward and backward, and can navigate tight spaces. The only family of fish outside the Amiidae family to use Amiiform swimming are the Seahorse members of Sygnathidae, who undulate their dorsal fin for propulsion, and use their pectoral fins to maneuver and steer. Watch Amiiform swimming here.

Lined Seahorse, Hippocampus erectus. Photographed at Aquarium of Niagara, NY, in April, 2019.© Sara Krebsbach 2019.
Gymnotiform swimming is characterized by propulsive undulations of the long anal fin found in the order, Gymnotiformes (knifefishes). The body is held straight and rigid, and only the undulations moving through fin provide propulsion, both forward and backward. Watch Gymnotiform swimming here.
Balistiform swimming is characterized by propulsive undulations of the anal and dorsal fins, found in the family, Balistidae (triggerfish), and Monacanthidae (filefish). The Anal and dorsal fins are set on an incline away from the mid-body toward the caudal fin, which allows for thrust during undulatory movement. The caudal fin is used for stability, and the pectoral fins are used for steering and maneuvering. Watch Balisiform swimming here.

Fringed Filefish, Monacanthus ciliatus. Photographed at Texas State Aquarium, TX, in March, 2024. © Sara Krebsbach 2024.
Tetraodontiform swimming is characterized by asynchronous oscillations of the dorsal and anal fins. Both fins are used together and oscillate back and forth along the median line of the fish, creating propulsive force. The pectoral fins and the caudal fin are used for stability and maneuvering; pelvic fins absent. Watch Tetraodontiform swimming here.

Checkered Puffer, Sphoeroides testudineus. Photographed at Texas State Aquarium, TX, in February, 2024. © Sara Krebsbach 2024.
Locomotion of Sharks:
The majority of sharks utilize either Anguilliform or Carangiform locomotion, with the proportion of their body and caudal fin contributing to propulsive undulations needed for thrust, determining the type. Due to the musculature and cartilaginous skeleton of sharks, in both their bodies and caudal fin, as well as the use of their dorsal fins for thrust, the strength of each wave is much stronger than in bony fish, resulting in high efficiencies for the steady cruising speeds characteristic of sharks (Helfman et al., 2023).
Sharks in the Hemiscylliidae family, i.e. bamboo sharks, utilize anguiliform locomotion (watch here). Sharks in the Carcharhinidae family, i.e. requiem sharks, utilize carangiform locomotion (watch here) (Klimley et al., 2023), and the 5 extant shark species in the Lamnidae (Mackerel) family, i.e. great whites, utilize thunniform locomotion (watch here), having a thin caudal peduncle and high aspect ratio tail (Helfman et al., 2023).
Sharks have unique morphological features that allow them to utilize Anguilliform and Carangiform locomotion:
Streamlined body shape with two dorsal fins that taper posteriorly. The first is longer than the second and they are separated by a large gap. The tapered fins leave a wake, which is laterally displaced by sinusoidal waves, enhancing the thrust displaced by the trailing fin (Webb, 1984; Helfman et al., 2023)
Caudal fin shape called ‘heterocercal’, characterized by an asymmetrical bi-lobed caudal fin shape. The upper lobe of the caudal fin is extended from the vertebral column, resulting in a longer upper lobe than lower lobe. This acts as a third dorsal fin that generates both power and lift in the water colum.
Cartilaginous skeleton that allows for increased flexion during undulations.
Skin structures, such as overlapping denticles (placoid scales), decrease drag while swimming. Internal dermal components, such as collagen fibers, act as tendons would to contribute to their strength and bend-ability during undulations (Helfman et al., 2023).
Internal hydrostatic pressure increases as swimming speed increases, by up to 10 times! This pressure causes their skin to tighten and stiffen, creating increased power on undulatory contractions.



Sandbar Shark, Carcharhinus plumbeus, utilizing Carangiform locomotion. Photographed at Texas State Aquarium, TX, in February, 2024. © Sara Krebsbach 2024.
References:
Breder, C. M. (1926). The locomotion of fishes. Zoologica : Scientific Contributions of the New York Zoological Society., 4(5), 159–297. https://doi.org/10.5962/p.203769
Di Santo, V., Goerig, E., Wainwright, D. K., Akanyeti, O., Liao, J. C., Castro-Santos, T., & Lauder, G. V. (2021). Convergence of undulatory swimming kinematics across a diversity of fishes. Proceedings of the National Academy of Sciences, 118(49), e2113206118. https://doi.org/10.1073/pnas.2113206118
Klimley, A. P., Porcher, I. F., Clua, E. E. G., & Pratt, H. L. (2023). A review of the behaviours of the Chondrichthyes: A multi-species ethogram for the chimaeras, sharks, and rays. Behaviour, 160(11–14), 967–1080. https://doi.org/10.1163/1568539X-bja10214
Lindsey, C. C. (1978). “Form, Function and Locomotory Habits in Fish”. Fish Physiology, Vol. VII Locomotion. Academic Press, Inc.
Helfman, G. S., Collette, B. B., Facey, D. E., & Bowen, B. W. (2023). The diversity of fishes (3rd ed.). Wiley-Blackwell.
Sfakiotakis, M., Lane, D. M., & Davies, J. B. C. (1999). Review of fish swimming modes for aquatic locomotion. IEEE Journal of Oceanic Engineering, 24(2), 237–252. https://doi.org/10.1109/48.757275
Webb, P. W. (1984). Form and Function in Fish Swimming. Scientific American, 251(1), 72-83. http://www.jstor.org/stable/24969414